Localisation et reconnaissance de drones sur antennes microphoniques MEMS compactes
Ce projet s'inscrit dans les études liées à la détection et la localisation de sources sonores en mouvement en environnements complexes, comme peuvent l'être les environnements urbains ou bruités. Les événements récents ont montré que la démocratisation de la commercialisation de drones aériens et terrestres, et leur capacité à transporter des charges de plus en plus lourdes voit l'émergence de nouvelles menaces pour les infrastructures sensibles (centrales électriques, bâtiments sensibles, personnels, ...).
L'ISL et le LMSCC ont développé au cours des dernières années des méthodes performantes pour la localisation de divers types de sources sonores, transitoires ou stationnaires. Ces travaux constituent le socle de départ de ce projet, qui vise à améliorer ces méthodes de localisation, et à développer de nouvelles antennes microphoniques compactes, optimisées pour ce type d'applications. Le type de sources sonores que l'on souhaite couvrir correspond à des sources émettant à de faibles niveaux sonores et ayant la possibilité de changer de trajectoire rapidement (type drone civil).
L'essentiel de cette page "projet" décrit les travaux réalisés pendant la thèse d'Aro Ramamonjy. Les éléments liés à l'ANR ASTRID "DEEPLOMATICS" dont le financement a débuté en janvier 2019 sont décrits dans un document séparé, puisque les approches testés sont fondamentalement différentes, même si l'application visée est similaire (localisation et reconnaissance de drones aériens discrets).
1 - Développement d'anntennes microphoniques compactes à base de MEMS numériques
Ce projet s'est tout d'abord appuyé sur la thèse d'Aro Ramamonjy, co-financée par la DGA et l'ISL, qui a permis de développer des antennes microphoniques composées de MEMS numériques, d'une envergure n'excédant pas la dizaine de centimètres.
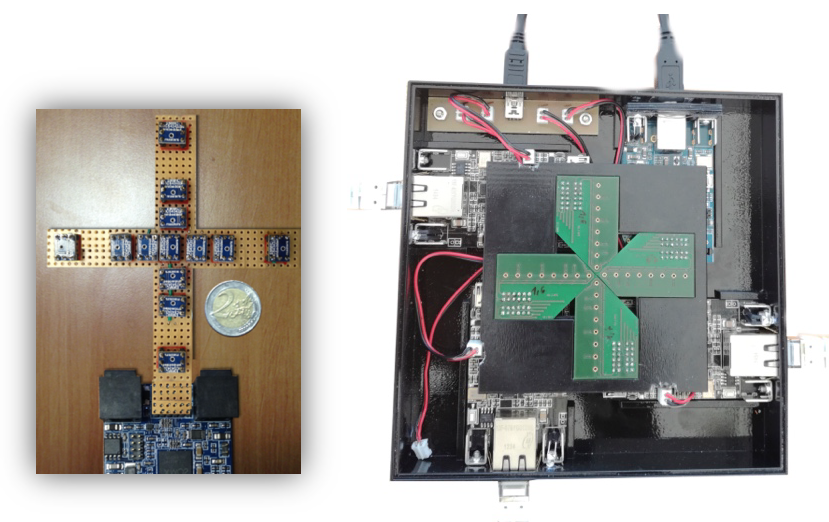
Le premier prototype, composé de 13 MEMS numériques répartis suivant une loi logarithmique a été développé au laboratoire afin de mesurer efficacement la pression et les composantes vectorielles de la vitesse particulaire sur une large bande fréquentielle. Une version préliminaire de ce dispositif, transmettant les signaux mesurés à un PC de commande via une liaison série USB2 a été validée pour le suivi goniométrique en azimut et en élévation d'une trajectoire de drones en laboratoire grâce à une approche basée sur des modèles de propagation acoustique. Un second prototype, composé de 32 MEMS numériques répartis en 4 faisceaux de 8 voies transmettant les données microphoniques par ethernet sur protocole AVB a également été développé et testé lors de la campagne de mesure sur le terrain d'essai de l'ISL, à Baldersheim, en juin 2017.
2 - Localisation temps réel de sources en mouvement
Le second volet de ce projet développé dans le cadre de la thèse d'Aro Ramamonjy concerne le développement d'algorithmes de localisation de sources en mouvement, avec une contrainte forte consistant à une évaluation en temps réel de la position de la source. Pour cela, nous avons développé des algorithmes exploitant la topologie de l'antenne différentielle développée, afin d'estimer précisément la pression et les composantes horizontales de la vitesse particulaire de l'onde acoustique émise par la source en mouvement. Ces composantes sont ensuite utilisées pour estimer l'azimuth et l'élévation de la source en temps réel, en utilisant un algorithme RANSAC à partir des données temporelles (fit dans l'espace pression / vitesse pour estimer la position angulaire à toutes les 100 ms environ).
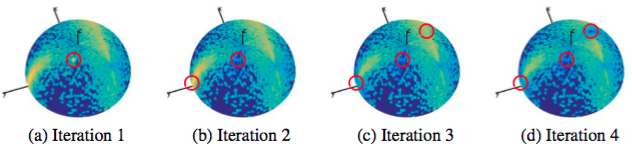
Dans le cadre de sa thèse, Aro Ramamonjy s'est également intéressé à la problématique de la localisation de sources multiples, et a proposé une approche itérative basée sur un histogramme de probabilité de présence :
3 - Reconnaissance de signature de drones
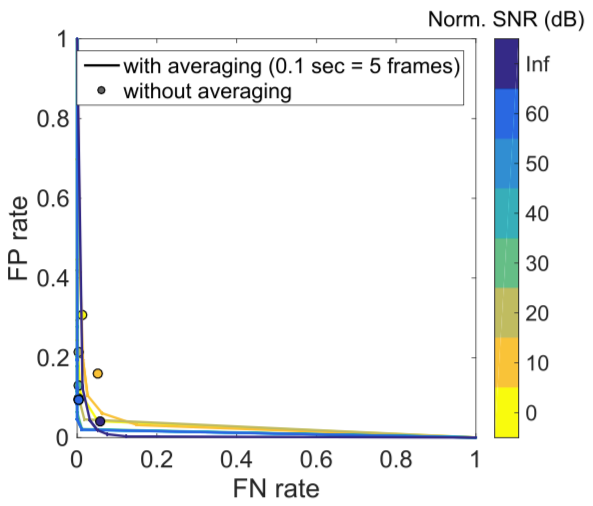
Le dernier volet de la thèse d'Aro Ramamonjy concerne la détection et la reconnaissance de drones. Pour cela, il s'est appuyé sur une technique de classification de type arbre de décision "Repeated Incremental Pruning to Produce Error Reduction" (JRip) pour détecter efficacement la présence de drones, à partir d'une base de données enregistrée pendant 3 jours sur le terrain d'essais de Baldersheim. Cette méthode, combinée à un filtrage spatial, laisse envisager de bonnes performances de détection.
Durée du projet : En cours, depuis 2015
Financement et contrats :
- Financement thèse DGA et Institut Saint Louis (2015-2018)
- Projet ANR ASTRID "Deeplomatics" sélectionné pour financement (2019-2022)